Publications
A collection of my work in Robotics and AI.


RoboCat: A Self-Improving Foundation Agent for Robotic Manipulation
Konstantinos Bousmalis*, ..., , et al.

Lossless Adaptation of Pretrained Vision Models For Robotic Manipulation
Mohit Sharma, Claudio Fantacci, , Skanda Koppula, Nicolas Heess, Jon Scholz, Yusuf Aytar
How to Spend Your Robot Time: Bridging Kickstarting and Offline Reinforcement Learning
Alex X Lee*, Coline Devin*, Jost Tobias Springenberg*, , et al.



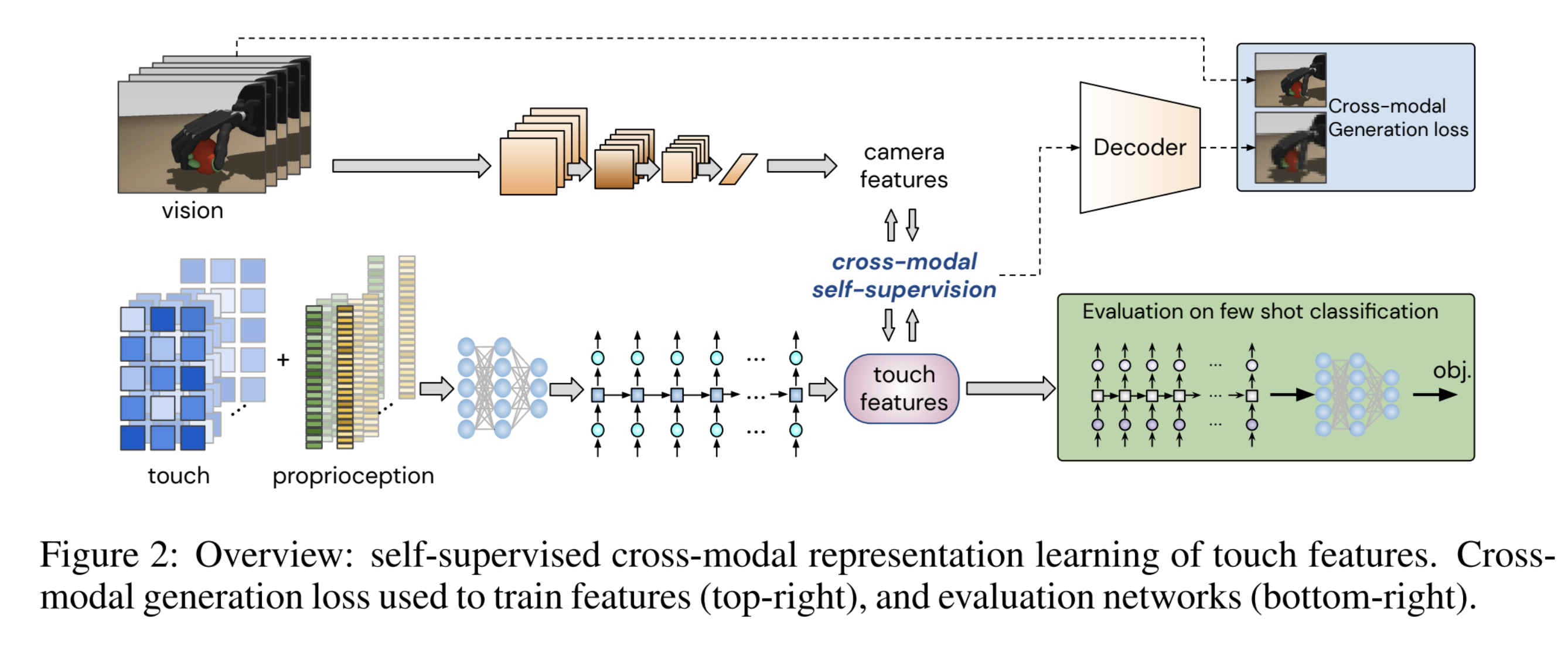
Learning rich touch representations through cross-modal self-supervision
Martina Zambelli, Yusuf Aytar, Francesco Visin, , Raia Hadsell
Learning Dexterous Manipulation from Suboptimal Experts
Rae Jeong, Jost Tobias Springenberg, ..., , et al.

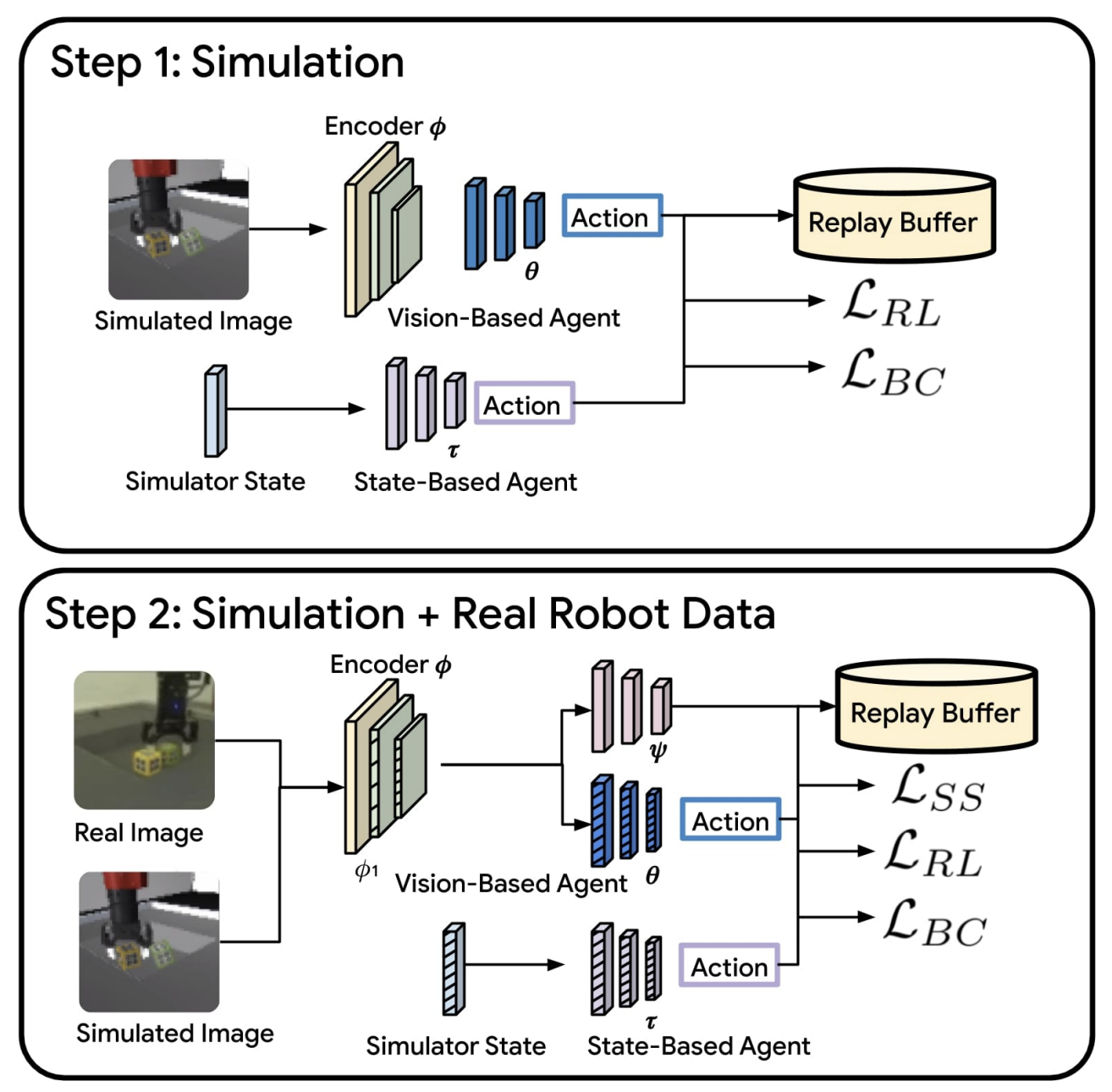
Self-supervised sim-to-real adaptation for visual robotic manipulation
Rae Jeong, Yusuf Aytar, David Khosid, , et al.
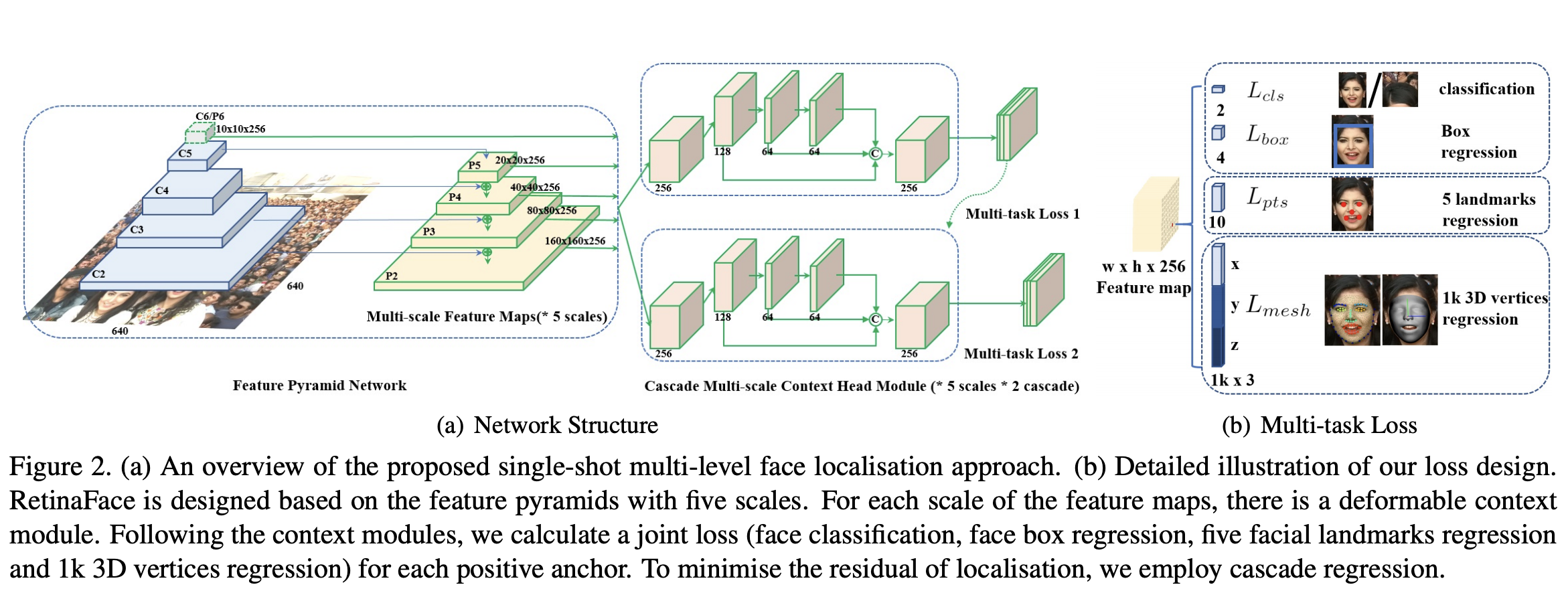
RetinaFace: Single-stage dense face localisation in the wild
Jiankang Deng, Jia Guo, , Jinke Yu, Irene Kotsia, Stefanos Zafeiriou
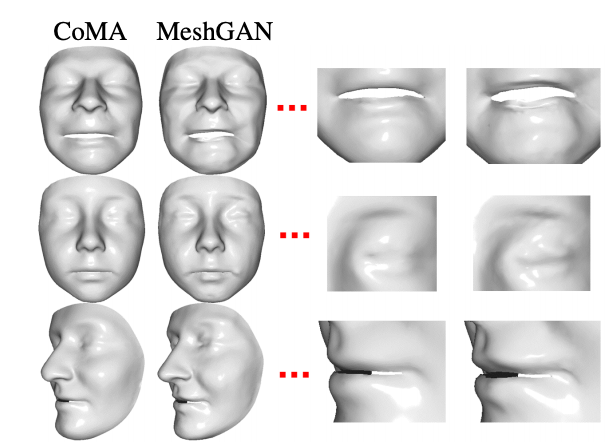
MeshGAN: Non-linear 3D Morphable Models of Faces
Shiyang Cheng, Michael Bronstein, , et al.
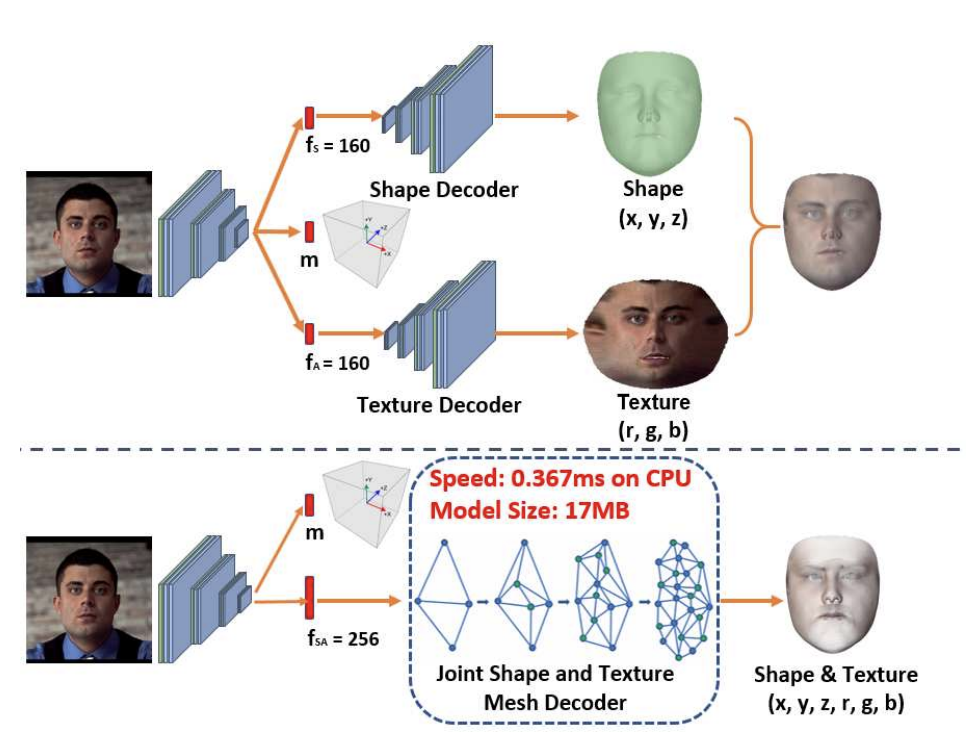
Dense 3d face decoding over 2500fps: Joint texture & shape convolutional mesh decoders
, Jiankang Deng, Irene Kotsia, Stefanos Zafeiriou
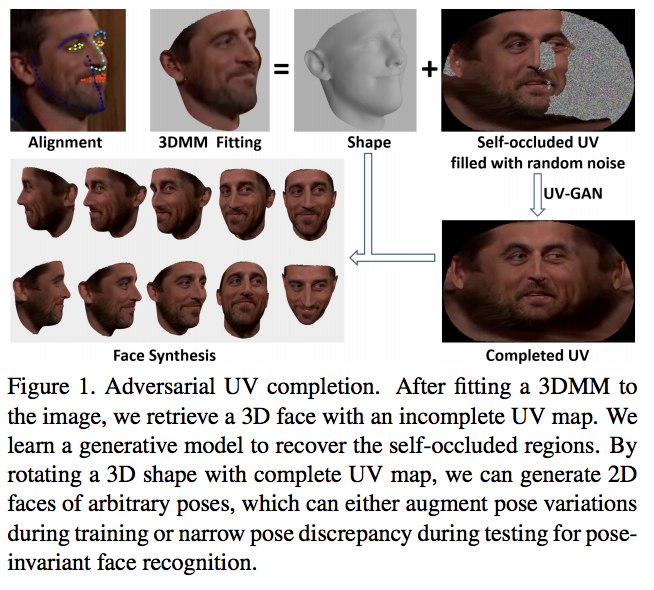
UV-GAN: Adversarial Facial UV Map Completion for Pose-invariant Face Recognition
Jiankang Deng, Shiyang Cheng, Niannan Xue, , Stefanos Zafeiriou
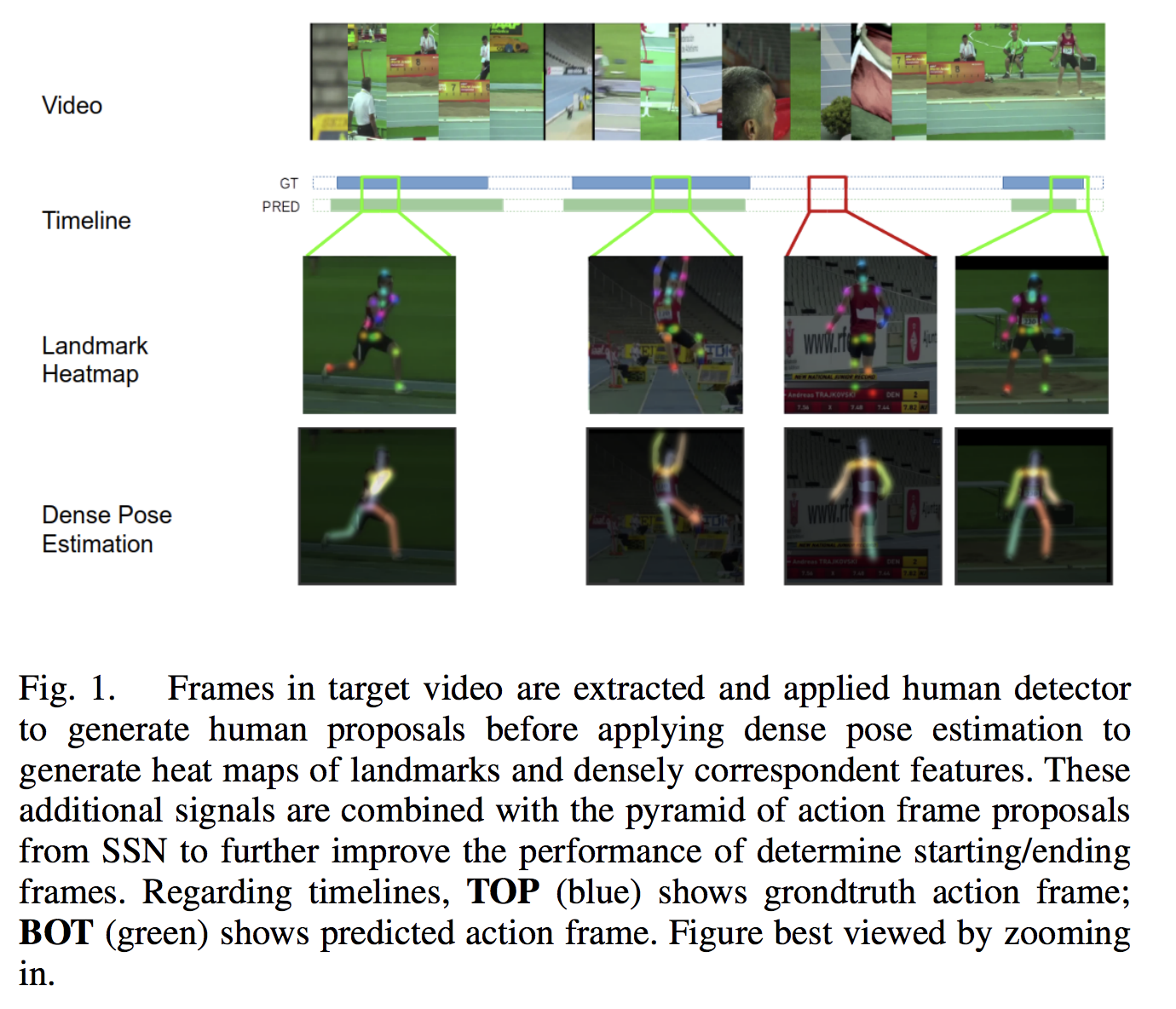
Improve Accurate Pose Alignment and Action Localization by Dense Pose Estimation
, Jiankang Deng, Stefanos Zafeiriou
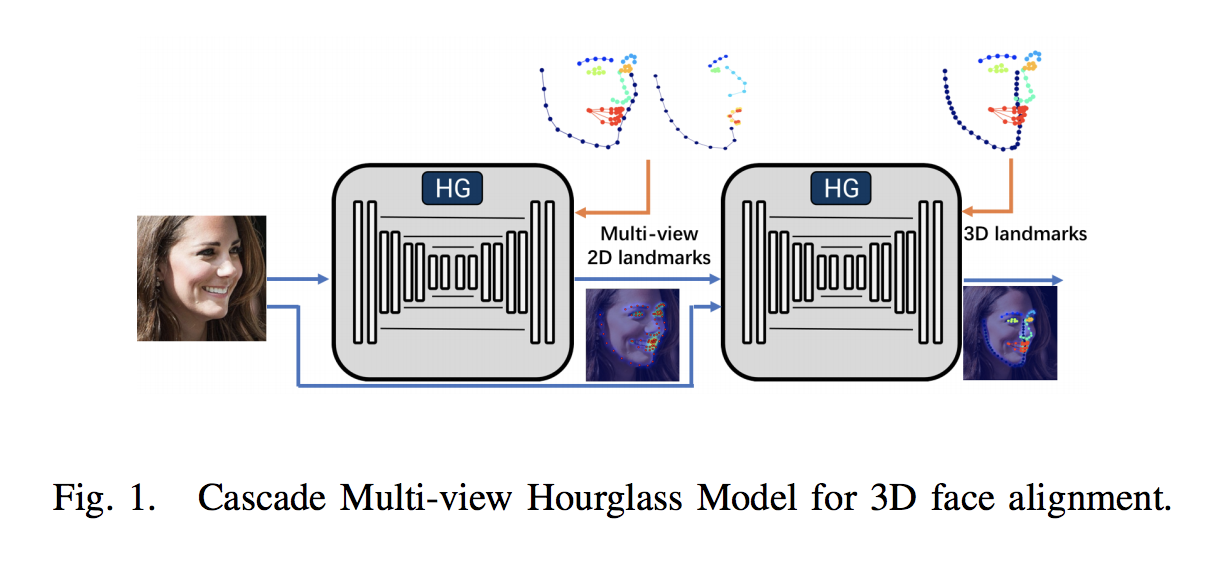
Cascade Multi-view Hourglass Model for Robust 3D Face Alignment
Jiankang Deng, , Shiyang Cheng, Stefanos Zaferiou
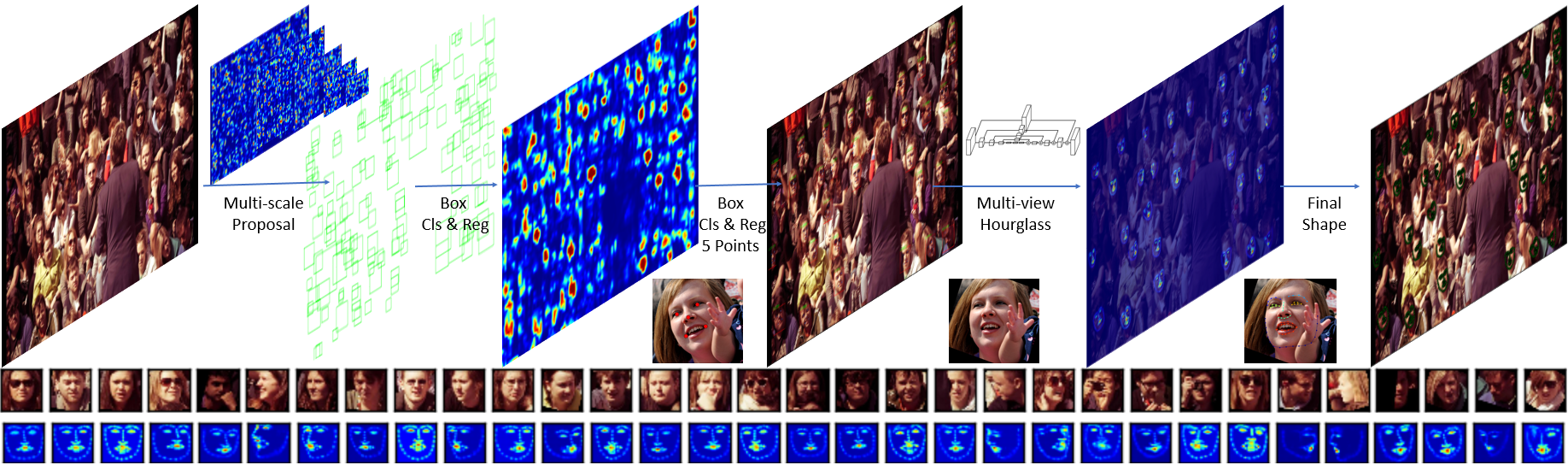
Joint Multi-view Face Alignment in the Wild
Jiankang Deng, George Trigeorgis, , Stefanos Zafeiriou
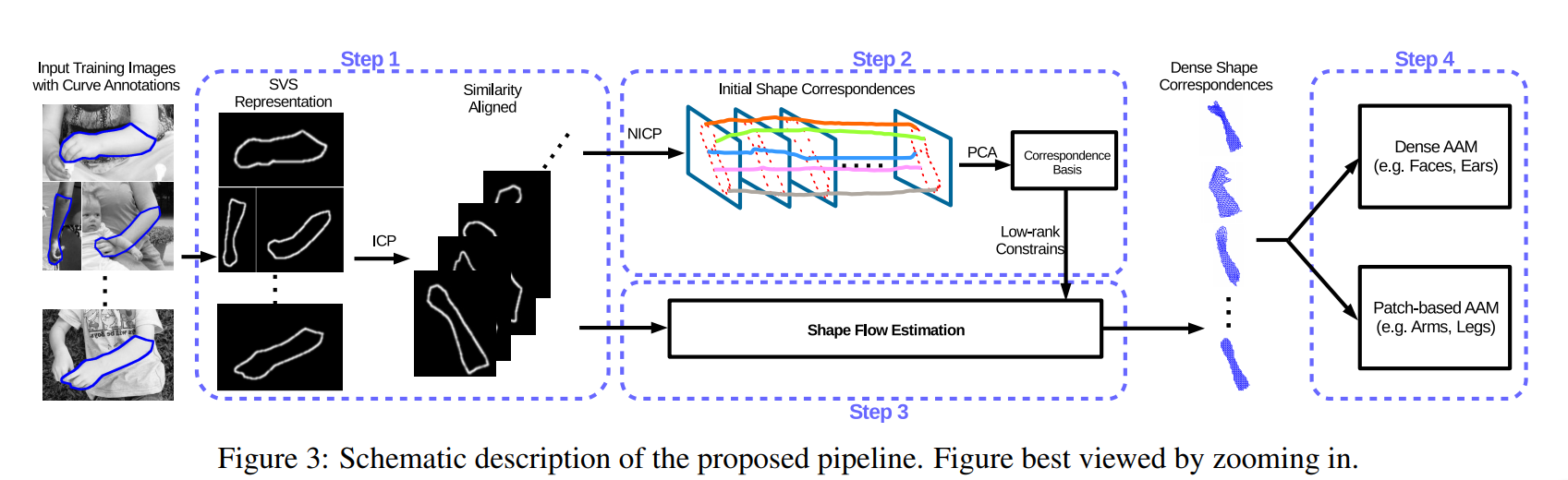
Estimating Correspondences of Deformable Objects "In-the-wild"
, Epameinondas Antonakos, Anastasios Roussos, Stefanos Zafeiriou
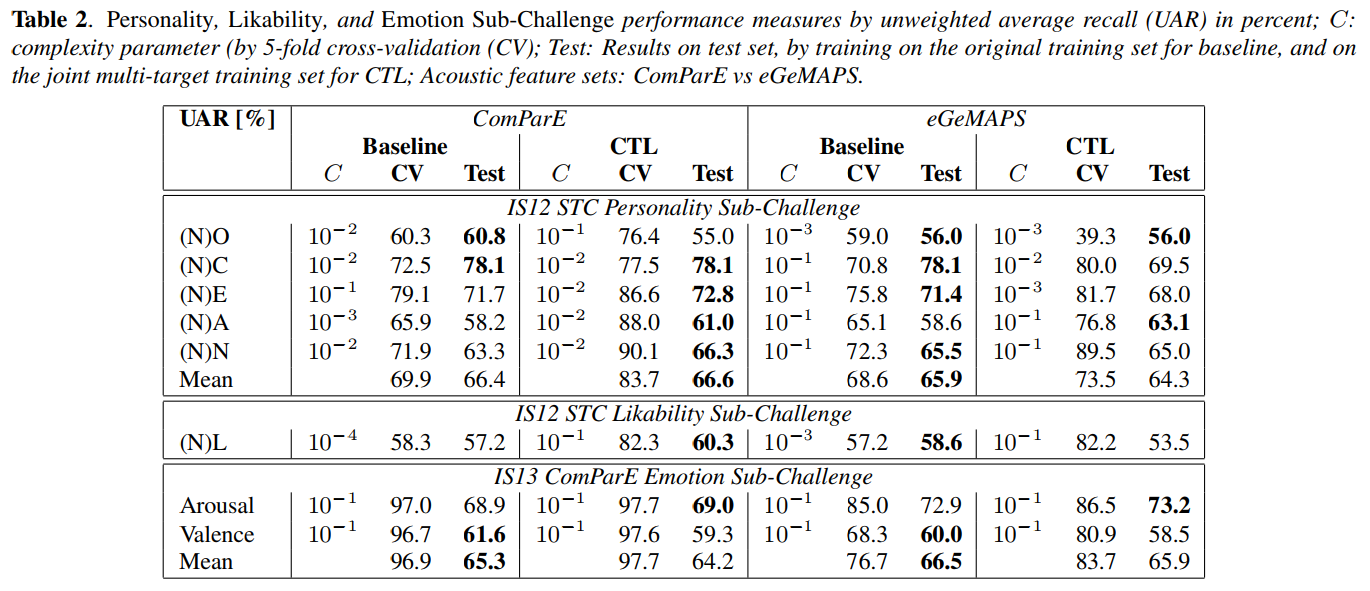
Semi-autonomous Data Enrichment Based on Cross-task Labelling of Missing Targets for Holistic Speech Analysis
Yue Zhang, , Jie Shen, Björn Schuller
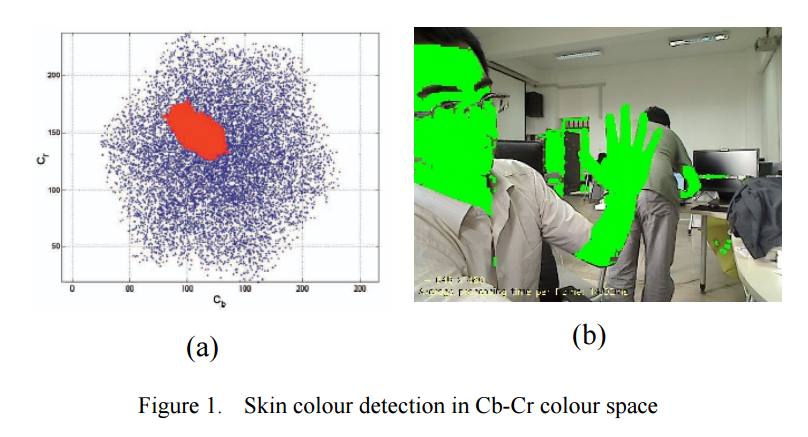
Fingertips Detection Algorithm Based on Skin Colour Filtering and Distance Transformation
Yun Liao, , Hua Zhou, Zhihong Liang